Վեց առանցքային համագործակցային ռոբոտային պտուտակային ամրացնող մեքենա

Սարքի պարամետր
| Մոդել | GR-XFXZ950 |
| Ռոբոտի հասանելիությունը | 950 մմ |
| Ռոբոտի վերջնական բեռը | 16 կգ |
| Կերակրման հարթակ | Կենտրոնական կառավարման պտտվող սեղան + սերվոշարժիչ |
| Կերակրման մեթոդ | Փչող սարքը/սպիրատը համատեղելի են |
| Կողպեքի եկամտաբերությունը | 99.95% |
| Աշխատանքային էլեկտրամատակարարում | AC220V |
| Աշխատանքային օդի աղբյուր | 0.4-0.7 ՄՊա |
| ուժ | Մոտավորապես 2.5 կՎտ |
| Կոորդինատների մեթոդի սահմանում | Տեսողական դիրքավորում |
| Արտաքին չափս (L*W*H) | 1400*1900*1950 մմ |
| Քաշը (կգ) | 800 |
| Վիճակը | Նոր |
| Հիմնական բաղադրիչների երաշխիք | 2 տարի |
Սարքի առանձնահատկությունները
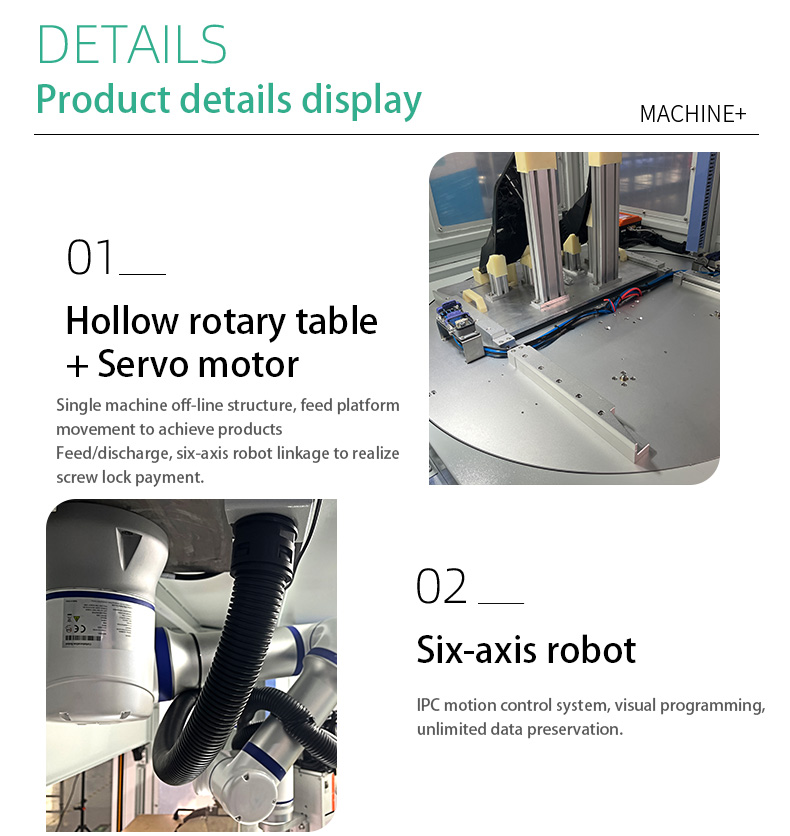
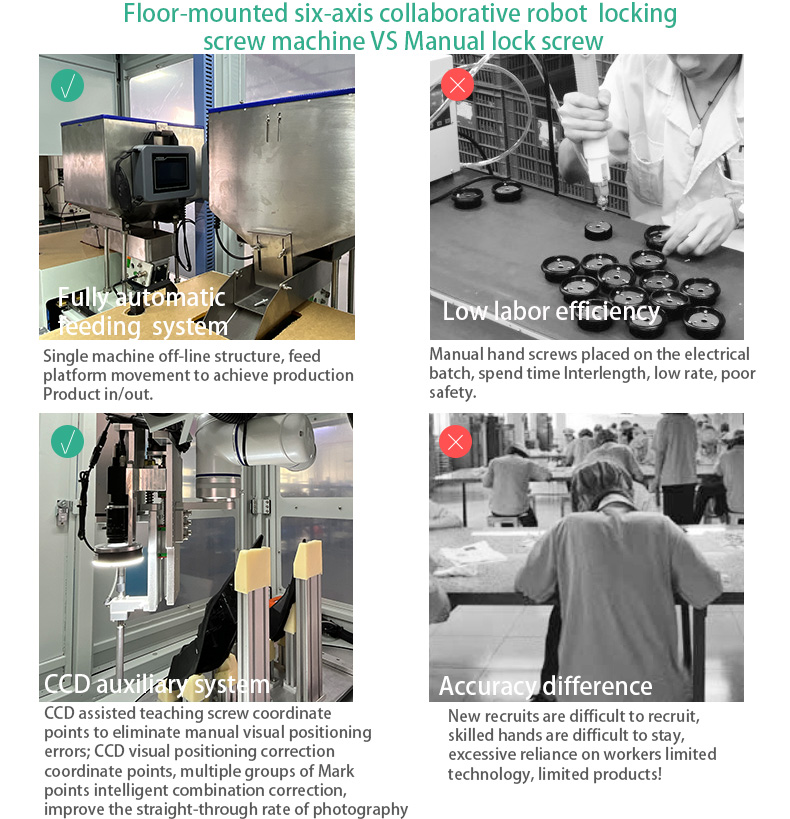
1. Մեկ մեքենայով անջատված կառուցվածք, սնուցող հարթակի շարժում՝ արտադրանքի մուտքագրման/ելքի հասնելու համար, վեց առանցքային ռոբոտային կապ՝ պտուտակային կողպեքի վճարման հասնելու համար
2.IPC շարժման կառավարման համակարգ, տեսողական ծրագրավորում, անսահմանափակ տվյալների պահեստավորում;
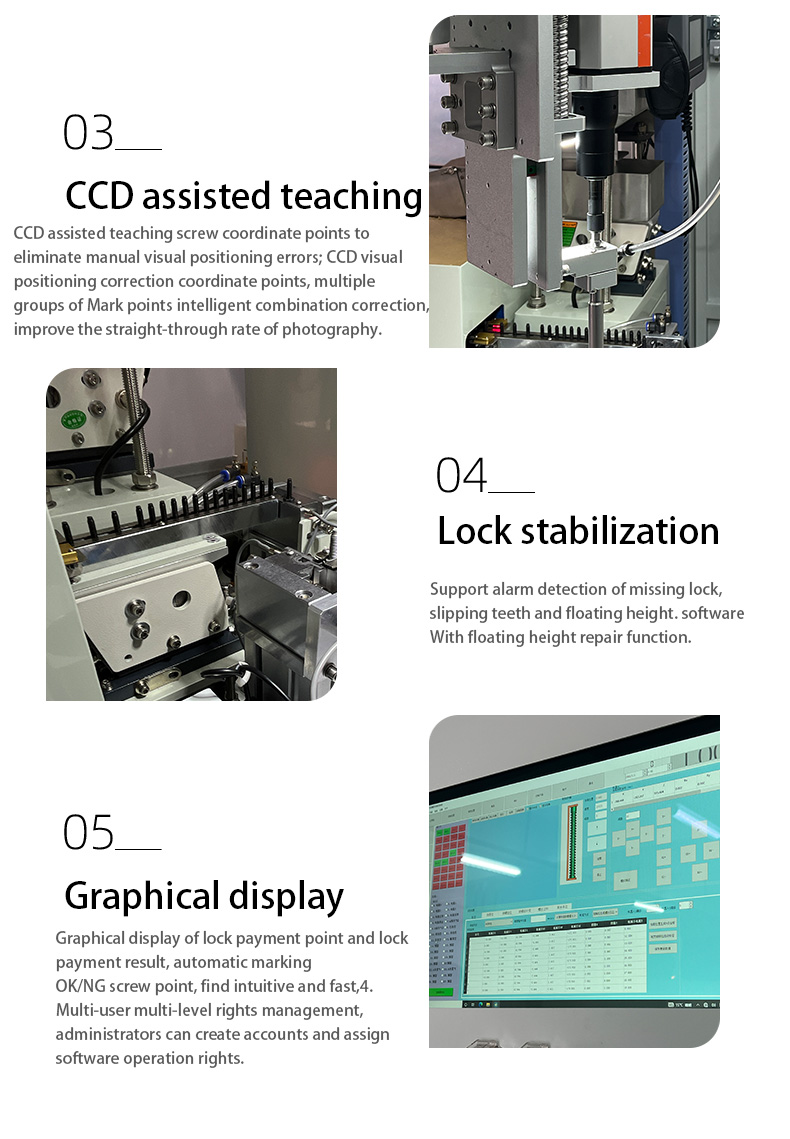
3. Գրաֆիկորեն ցուցադրել կողպեքի վճարման կետը և կողպեքի վճարման արդյունքը, ավտոմատ կերպով նշել OK/NG պտուտակի կետը, գտնել ինտուիտիվ և արագ։
4.. Բազմաօգտատեր և բազմամակարդակ իրավունքների կառավարում, ադմինիստրատորները կարող են ստեղծել հաշիվներ և նշանակել ծրագրային ապահովման շահագործման իրավունքներ
5. CCD-ի օգնությամբ պտուտակային կոորդինատային կետերի ուսուցում՝ ձեռքով տեսողական դիրքորոշման սխալները վերացնելու համար։ CCD տեսողական դիրքորոշման ուղղման կոորդինատային կետերը, նշանային կետերի բազմակի խմբերի ինտելեկտուալ համակցված ուղղումը բարելավում են լուսանկարների անցման մակարդակը։
6. Աջակցում է բացակայող կողպեքի, սահող ատամների և բարձր լողացող տագնապի հայտնաբերմանը: Ծրագիրը գալիս է լողացող բարձրության վերականգնման գործառույթով:
7. Z-առանցքը կարող է կարգավորվել լազերային տեղաշարժի սենսորով (լողացող բարձրությունը չափելու համար) և ներքևի ճնշման հայտնաբերման սենսորով (ըստ ցանկության)։
8. Էլեկտրական խմբաքանակը կարող է հագեցած լինել HIOS էլեկտրական խմբաքանակով, Qili արագության էլեկտրական խմբաքանակով, սերվո էլեկտրական խմբաքանակով, ինտելեկտուալ էլեկտրական խմբաքանակով և այլն (ըստ ցանկության):
9. Սարքավորումները կարող են բեռնել MES-ը հաճախորդի պահանջներին համապատասխան, ինչպիսիք են պտտող մոմենտը, պտույտների քանակը, անկյունը, պտտող մոմենտի կորը, կողպեքի կարգավիճակը:
10. Կարող եք ընտրել ձեռքով և ավտոմատ սկանավորում (ըստ ցանկության)
11.. Արտադրության տվյալները կարելի է հետևել, և ծրագիրը գալիս է որակի վերահսկման տախտակով: Բոլոր տեսակի տվյալները կարելի է վերբեռնել և ներբեռնել (ըստ ցանկության):
12. Ավտոմատ պտտող մոմենտի կետի ստուգում, պտտող մոմենտի կետի ստուգման արդյունքների և հարցումների պահպանում (ըստ ցանկության):

Մանրամասներ