


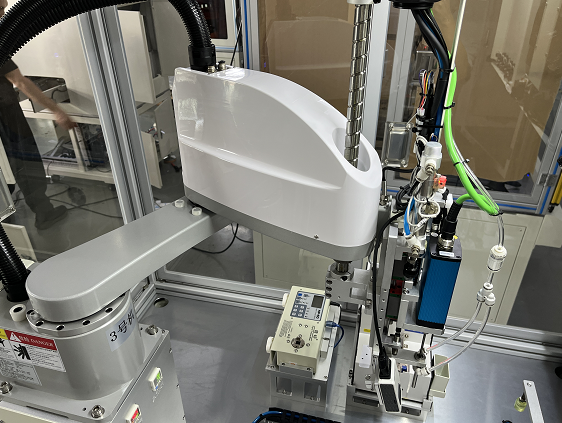
Չորս առանցքային ռոբոտային ադսորբցիոն տիպի պտուտակային ամրացնող մեքենա

Սարքի պարամետր
| իր | Տեխնիկական բնութագրեր |
| Մոդել | GR-XFSZ600/GR-XFSZ800 |
| Ռոբոտի հասանելիությունը | 600 մմ/800 մմ |
| Բրենդի անվանումը | Կանաչ |
| Բանալի բառեր | մեքենայական պտուտակ |
| Սնուցման լիսեռի հարված | 500 մմ/800 մմ |
| Չափս (Երկարություն*Լայնություն*Բարձրություն) | 1300*1000*1950 մմ/1500*1200*1950 մմ |
| Ծրագրի պահեստավորման հզորություն | 0-1200 մմ/վրկ |
| Առանցքի շարժման արագությունը | 999 խումբ |
| Կողպման արդյունավետություն | մեկ պտուտակը մոտ 2.0-2.5S է |
| Կողպեքի եկամտաբերությունը | 99.98% |
| Աշխատանքային էլեկտրամատակարարում | AC220V |
| Աշխատանքային օդի աղբյուր | 0.4-0.7 ՄՊա |
| ուժ | Մոտավորապես 1.5 կՎտ |
Սարքի առանձնահատկությունները
1. Առանձին անցանց կառուցվածք, կերակրման հարթակը շարժվում է արտադրանքի կերակրման/լիցքաթափման համար, իսկ չորս առանցքային ռոբոտային կապը իրականացնում է պտուտակային ամրացում
2. IPC շարժման կառավարման համակարգ, տեսողական ծրագրավորում, անսահմանափակ տվյալների խնայողություն։
3. Կողպման կետերի և կողպման արդյունքների գրաֆիկական ցուցադրում, OK/NG պտուտակային կետերի ավտոմատ նշում, ինտուիտիվ և արագ որոնում։
4. Բազմաօգտատեր, բազմամակարդակ թույլտվությունների կառավարում, ադմինիստրատորները կարող են ստեղծել նոր հաշիվներ և նշանակել ծրագրային ապահովման շահագործման թույլտվություններ
5. CCD-ի օգնությամբ պտուտակային կոորդինատային կետերի ուսուցում՝ ձեռքով տեսողական դիրքավորման սխալները վերացնելու համար։ CCD տեսողական դիրքավորման ուղղման կոորդինատային կետեր, նշանային կետերի բազմակի խմբերի ինտելեկտուալ համակցված ուղղում, բարելավում է լուսանկարչության առաջին անցման արագությունը։
6. Աջակցում է տագնապի հայտնաբերմանը, ինչպիսիք են արտահոսող կողպեքը, սահող ատամները, լողացող ատամները և այլն: Ծրագիրը գալիս է լողացող բարձրության վերանորոգման գործառույթով:
7.7. Z-առանցքը կարող է հագեցած լինել լազերային տեղաշարժի սենսորով (լողացող բարձրության չափում), ներքևի ուժի հայտնաբերման սենսորով (ըստ ցանկության):
8. Էլեկտրական խմբաքանակը կարող է հագեցած լինել HIOS էլեկտրական խմբաքանակով, Qili արագության էլեկտրական խմբաքանակով, սերվո էլեկտրական խմբաքանակով, ինտելեկտուալ էլեկտրական խմբաքանակով և այլն (ըստ ցանկության):
9. Սարքավորումները կարող են վերբեռնել MES-ը՝ ըստ հաճախորդի կարիքների, ինչպիսիք են պտտող մոմենտը, պտույտների քանակը, անկյունը, պտտող մոմենտի կորի դիագրամը և կողպեքի կարգավիճակը:
10. Կարող է ընտրվել ձեռքով կոդի սկանավորում և ավտոմատ կոդի սկանավորում (ըստ ցանկության)
11. Արտադրական տվյալները կարող են հետևվել, և ծրագիրը գալիս է որակի վերահսկողության կանբանով: Բոլոր տեսակի տվյալները կարող են վերբեռնվել և ներբեռնվել (ըստ ցանկության): 12. Ավտոմատ պտտող մոմենտի կետային ստուգում, պտտող մոմենտի կետային ստուգման արդյունքների պահպանում և հարցումներ (ըստ ցանկության):
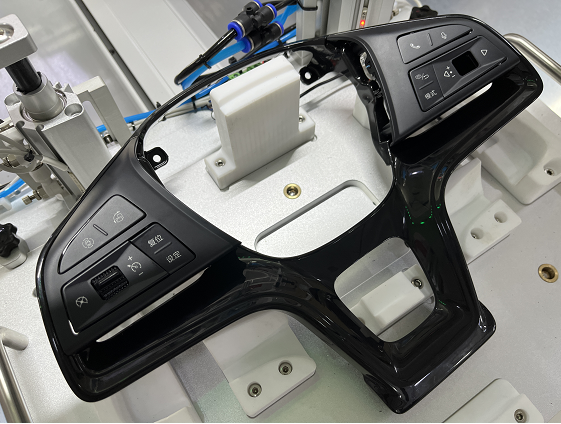
Մանրամասների ցուցադրում





Ապրանքների կատեգորիաներ
-

Մոբիլիզացիայի համար նախատեսված գծային տեսողական պտուտակային ամրացնող մեքենա...
-

Վեց առանցքային համագործակցային ռոբոտային պտուտակային ամրացում ...
-

Մեջքից մեջք պտուտակ ամրացնող մեքենա
-

Ուղղահայաց կրկնակի կայանի կլանման տեսակը պտուտակային T ...
-

Ուղղահայաց կրկնակի կայանի պտուտակային ամրացման մեքենա
-

Օդային փչման տիպի պտուտակային ամրացման մեքենա





